

Georeferenced 3D photogrammetry: a tool for monitoring finfish aquaculture impacts on hard seabeds
Hard substrates are often highly complex, making them difficult to sample in, but these new developments in 3D photogrammetry provide a potential step-change in how hard seabeds may be surveyed reliably.
Project team
Partners
Tritonia Scientific Ltd
Project leads
Dr Martin Sayer
Funding
UK Seafood Innovation Fund (SIF)*, supported by SAIC
* The UK Seafood Innovation Fund supports new ideas to deliver cutting-edge technology and innovation to the UK’s fishing, aquaculture and seafood industries.
Administered by the Centre for Environment, Fisheries and Aquaculture Science (Cefas) on behalf of the Department for Environment, Food and Rural Affairs (Defra), the programme encourages sustainable and innovative ideas to bring about seafood security, new partnerships across seafood and technology sectors, and to contribute to strong evidence-based management.
Impact
In this study, improved accuracy and reliability of underwater geolocation performance demonstrated that enhanced underwater navigation of observation-class ROVs is possible, and that further improvements can be made via a full R&D project.
£91,968
Total value
Case study
Download PDF
BACKGROUND
The current survey guidelines for hard substrate seabeds in finfish aquaculture necessitate detailed visual surveys in areas that are unsuitable for grab sampling. The standard uses a sampling grid on seabed types for the presence or absence of Priority Marine Features (PMFs). Two methods for visual data collection include drop-down cameras at grid intersections, and continuous footage taken along gridlines using towed cameras or remotely operated vehicles (ROVs). Geo-referencing is mandatory for drop-down video, and positional information must be recorded continuously for all footage.
Focusing visual surveys on gridlines or intersections poses a risk of overlooking crucial information, even with accurate positional data. Additionally, a substantial portion of georeferencing data may originate from the surface boat’s position, limiting accuracy due to the difficulties of maintaining umbilical proximity to true vertical, which along with other environmental factors significantly influences the disparity between surface and seabed positioning.
3D photogrammetry, a computer-based technique, generates intricate 3D point-cloud models from standard photos or videos. These models offer permanent records that can be analysed repeatedly and measured with greater accuracy than traditional methods. Particularly effective for identifying, measuring, and monitoring aquaculture impacts, this technique virtually eliminates water, providing clear visibility, revealing structures and environments that would be inaccessible through traditional means.
The technique offers immediate and clear evidence of seabed conditions, allowing accurate identification and quantification of biological species, detecting changes through automated comparison, and improving the monitoring of large, hard seabed areas. Its innovation lies in precise geolocation for comparative assessments.
See Tritonia's website for survey examples
ORIGINAL AIM
This project aimed to demonstrate the consistent generation of high-quality photogrammetric models from remotely operated underwater vehicle imagery. Such models can support fact-based regulation in aquaculture for the successful cohabitation of farmed and wild species in the marine environment.
WORK DONE
Improving accuracy and reliability of underwater geolocation
Enhancing underwater geolocation accuracy and reliability involved exploring Real-Time Kinematic (RTK) applications to improve the precision of GPS-derived positional data, and a Doppler Velocity Log (DVL) to estimate velocity relative to the sea bottom.
Integrating RTK technology into the topside ROV navigation unit significantly reduced the positional error of submerged ROVs during sea trials. The RTK-enabled system demonstrated an error radius below 0.3 meters, in contrast to the up to 1.5 meters observed with standard GPS.
RTK technology also improved underwater tracking. In repeated transects during trials, the RTK-enabled system exhibited a positional spread of less than two meters, while the non-RTK system showed over five meters.
The DVL unit demonstrated consistent performance with a known element of drift. The manufacturer acknowledges this known error, which could be rectified with additional time. While this affected the evaluation of optimal navigational performance at the feasibility stage, the achieved accuracy of ROV navigation using the RTK-enabled systems was sufficient to determine the reliability of repeated surveys.
Standardising survey methods that generate high-resolution 3D photogrammetric models from ROV-based imagery
To evaluate observation-class ROVs for creating accurate 3D photogrammetry seabed models – aiming for precision comparable to diving-based surveys – it was assumed that diving surveys would yield the most accurate models due to informed three-dimensional decisions by divers and superior camera and lighting systems.
For the three identical areas of seabed assessed (5 x 5 metres, 10 x 10 metres, and 10 x 20 metres) the models generated from the ROV imagery were comparable to those obtained by using divers, as seen below:
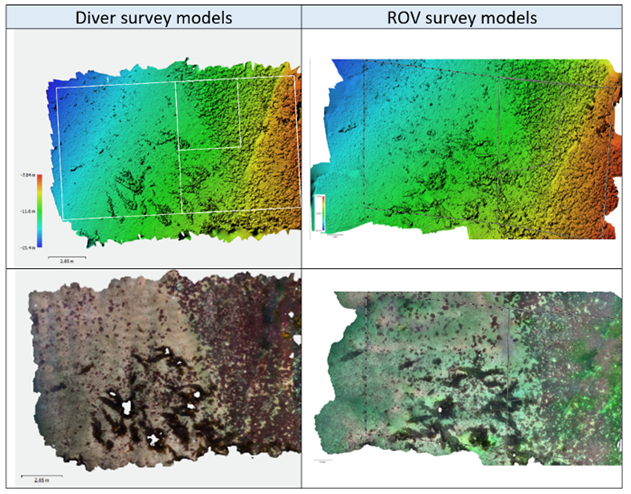
Exact comparisons between survey methodologies were complicated by seaweed. Manual removal of all seaweed from the models was necessary before comparisons could be made. The software used provided error estimates, illustrated through heatmaps and histograms, showing an error distribution of 1.84 ± 2.30cm (mean ± SD).
Demonstrating repeatable accuracy and precision of surveys
This was achieved by utilising advancements in underwater navigation to evaluate replicated ROV surveys, with the ROV pilot following courses determined solely from navigation information. As before, the software used provided error estimates, illustrated through heatmaps and histograms, which indicated an error distribution of 0.63 ± 0.96cm (mean ± SD).
Apart from physical metrics, abundance assessments of select biological species – including sea urchins, common starfish and scallops – were conducted among the models. There was 100% agreement in these assessments. The digital format of the models allowed for automated recording of abundance and significance of various species, suggesting it should be considered for further evaluation.
CONCLUSIONS
The navigation systems assessed in this project, incorporating RTK and DVL corrections, have substantially reduced errors. This improvement has enhanced the capability to survey large seabed areas with minimal data gaps.
Improved accuracy and reliability of underwater geolocation performance demonstrated that enhanced underwater navigation of observation-class ROVs is possible, and that further improvements can still be made via a full R&D project.
Results indicate the feasibility of constructing 3D photogrammetry seabed models using observation-class ROVs, with outputs comparable in quality to diver-based models. Survey size showed no obvious effects, and the time required for ROV deployment, recovery and system calibration offset any efficiency advantages with increased data collected.
These results indicate that regulatory standards are achievable when combining these technologies with advanced georeferencing systems. Together, these methods allowed the creation of precise seabed models at consistent locations for the accurate detection and measurement of changes over time.
This project has provided an opportunity to improve the systems, and the aim will be to be market-ready following further industry-relevant demonstrations that would be possible with full R&D funding. Such funding has now been made available by the Seafood Innovation Fund, with in-kind support from SAIC, and a follow-on project is underway.
Additional information
Feasibility study: Georeferenced 3D photogrammetry: a tool for monitoring finfish aquaculture impacts on hard seabeds (FS152) - Seafood Innovation Fund